















- 画像
- ビデオ
- 3Dモデル




ハイコスパ
中型オブジェクト最適
持ち運びやすい
POP 3 Plus 3Dスキャナー:鮮明な色彩を再現 ― Revopoint
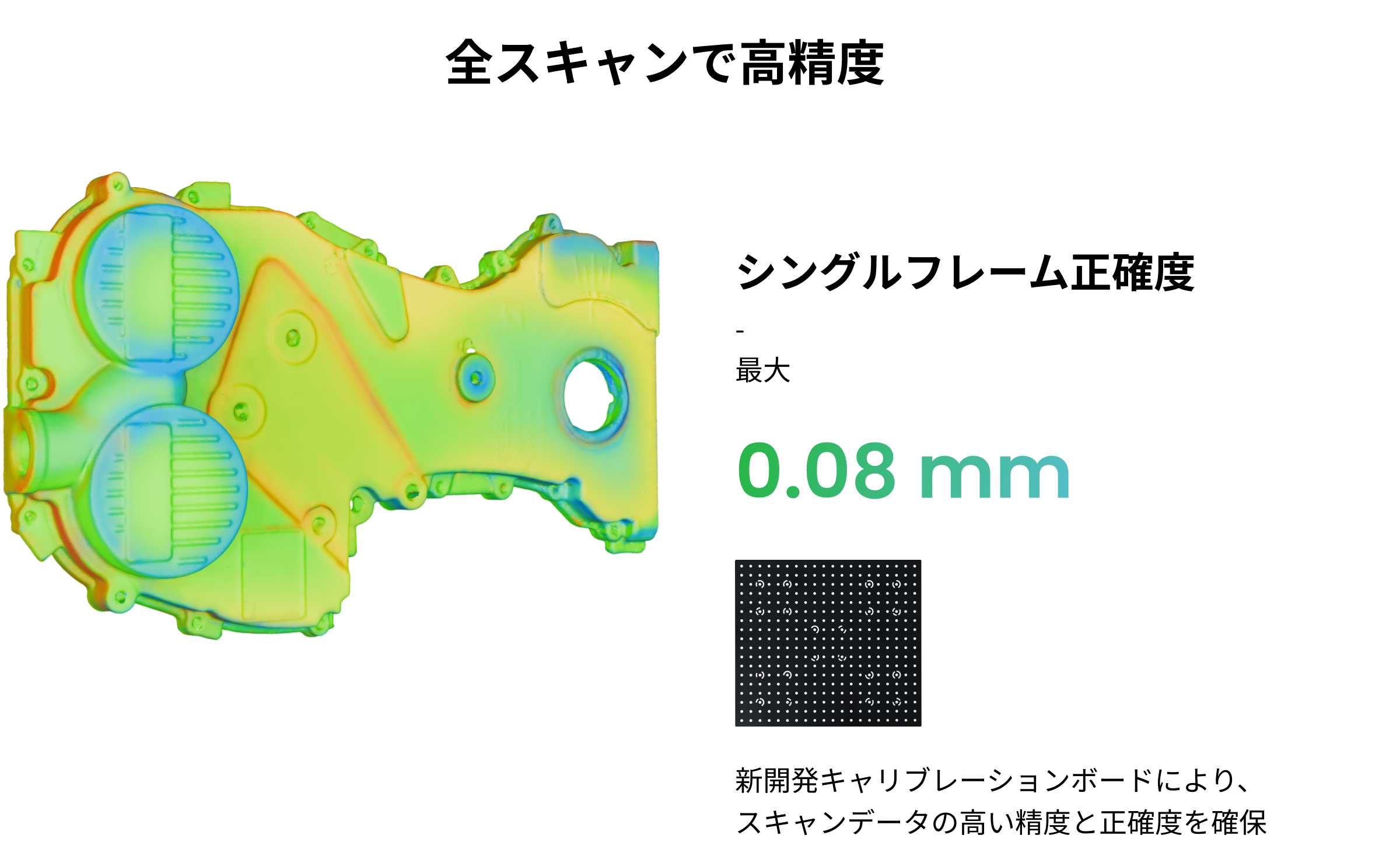
・シングルフレーム正確度 最大0.08 mm
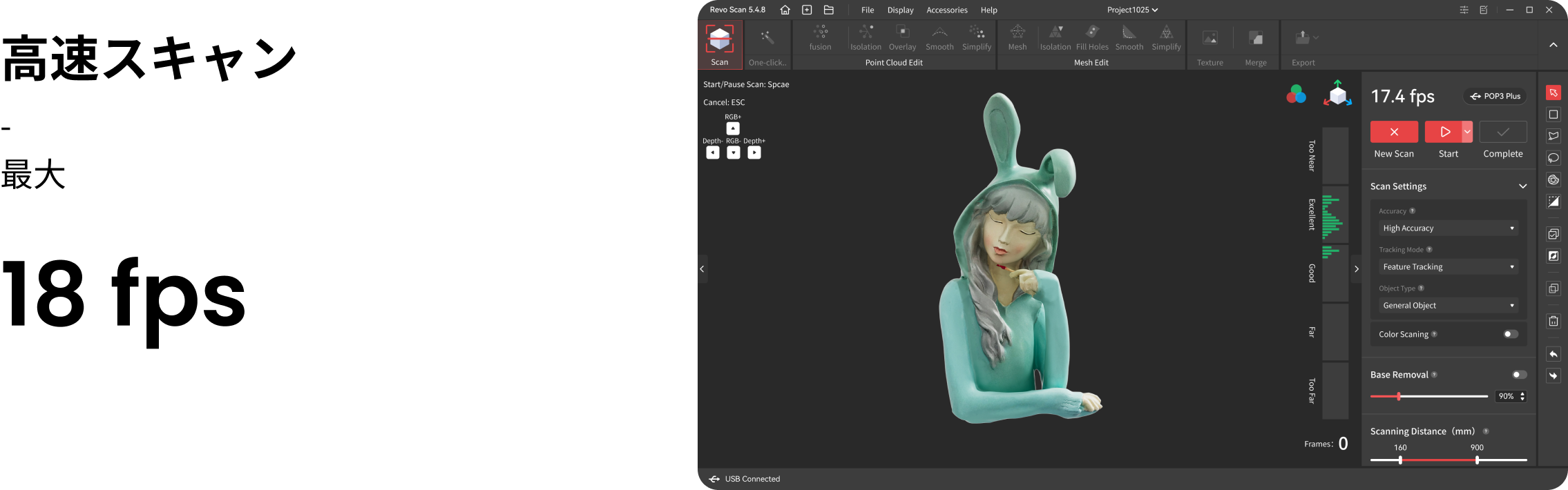
・最大18 fpsのスキャン速度
・最大2倍光学ズーム
・新しい全域マーカートラッキングモード
・HD RGBカメラによるカラースキャン向上
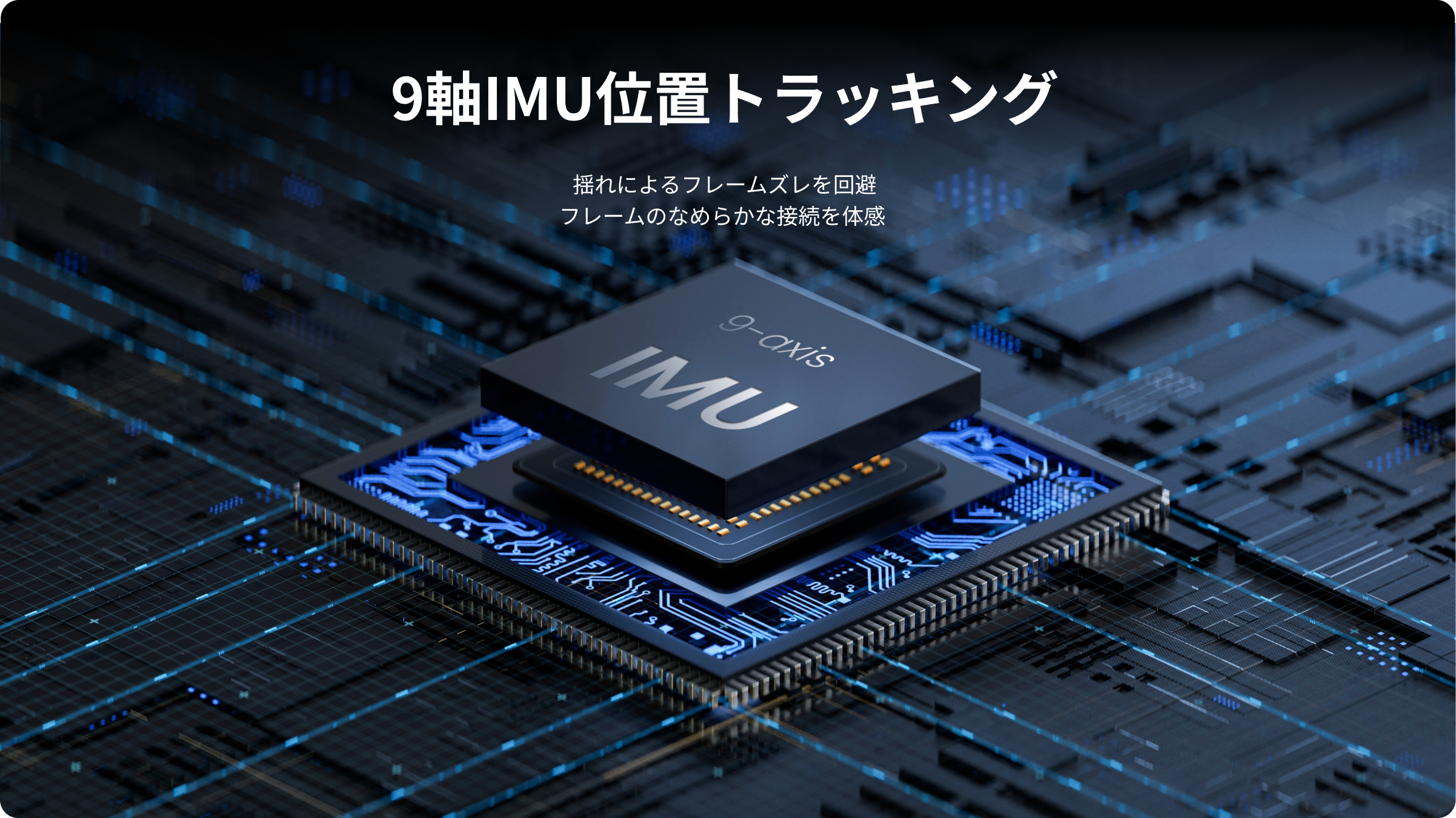
・9軸IMU
📩ライセンス購入後、アクティベーションコードをメールで送付します。📬
 配送ポリシー
配送ポリシー 限定保証
限定保証 返品ポリシー
返品ポリシー お支払方
お支払方隅々まで徹底的に最適化
POP 3 Plusは、従来シリーズ比精度20%向上と光学ズーム機能を追加。3Dプリントやアニメーション制作、リバースエンジニアリング、車両改造はもちろん、3D顔スキャナーとしても活用可能なマルチタスクスキャナーです。
的確な細部描写
新しい光学式プロジェクターズーム(最大2倍ズーム)



マーカー追跡性能の向上
全域マーカートラッキングモード

色彩豊かな3Dモデルの作成
HD RGBカメラ
フラッシュLEDが正確なカラーキャプチャを保証

ポータブルでコンパクト
スキャナーの重量はわずか190 g

反応の良いタッチ感
露出⁻ | スキャン開始/停止 | 露出+

強力なソフトウェア
iOS、Android、Windows、macOSデバイスに対応STL、PLY、OBJ、ASC、3MF、GLTF、FBXファイル形式をサポートし、ほとんどのCAD、3Dモデリング、スライサーソフトウェアと互換性があります。

さらに詳しく >
POP 3 Plusで作成した3Dモデル
さらに詳しく仕様
製品名
POP 3 Plus 3Dスキャナー
テクノロジー
デュアルカメラ赤外線構造化光
シングルフレーム正確度、最大
0.08 mm
シングルフレーム精度、最大
0.04 mm
スキャンスピード、最大
18 fps
点間距離
0.05 mm
シングルスキャン範囲(最小距離)
61 x 68 mm (距離 150 mm)
シングルスキャン範囲(最大距離)
244 x180 mm(距離 400 mm)
スキャン方式
手持ち&据え置き
動作距離
150 ~ 400 mm
最小スキャンサイズ
20 x 20 x 20 mm
最大スキャンサイズ
2 x 2 x 2 m
補助照明
赤外線補助照明、白色LED照明
視野角(水平 x 垂直)
40 x 25°
CPU
2コア、1.6 GHz
位置センサー
9軸IMU
本体重量
190 g
本体寸法(長さ×幅×高さ)
153 x 45 x 29 mm
トラッキング方式
特徴、マーカー、全域マーカー
ボタン
3
接続ポート
USB Type-C
出力電圧
DC 5V, 1A
Wi-Fi
6
Bluetooth規格
4.1
特殊オブジェクト
透明、暗い、反射する対象物をスキャンする際にスキャンスプレーを使用
スキャン環境
屋外/屋内スキャン
3Dプリント用データ出力
可
出力フォーマット
PLY, OBJ, STL, ASC, 3MF, GLTF, FBX
スキャナー校正
可
対応アクセサリー
大型ターンテーブ, 二軸ターンテーブル, ハンドヘルドスタビライザー
対応OS
Windows 10/11 (64-bit)、 Android、iOS、macOS 11.0以上
照明タイプ
クラス1赤外線 (目にセーフ)
最低PC要件*
macOS
CPU M1 Pro以上、RAM≧8GB
Windows
CPU Intel i7 12th以上、RAM 16GB以上
推奨PC要件*
macOS
CPU M3以上、RAM≧8GB
Windows
CPU Intel i9 11th以上、RAM 32GB以上
パッケージ内容
POP 3 Plus スタンダードセット








POP 3 Plus アドバンスセット
POP 3 Plus
スタンダードセット
+

二軸
ターンテーブル充電器

二軸ターンテーブル

パワーバンク

再利用可能な粘着パッド
よくある質問
応用例:MINIシリーズは、ジュエリー、ミニチュアフィギュア、ハードウェアの部品など、小型オブジェクトをスキャンする専門家向けに設計されており、豊かなディテールを取得できる正確なスキャンが可能です。POPシリーズは、エンジン部品や花瓶など、中型オブジェクトをスキャンする専門家向けに設計されています。RANGEシリーズは、家具、人体、車といった大型オブジェクトをスキャンする専門家向けに設計されており、効率的かつ正確なスキャンを確保します。INSPIREは、中型オブジェクトのスキャンを求めるアマチュア、3Dプリント愛好家、メーカーの方に適しています。MIRACOは、小さなものから大きなものまであらゆるものをスキャンし、スタンドアロンの3Dスキャン装置を必要とするプロフェッショナル向けに設計されています。推奨スキャンサイズ:MINI 2: 10 × 10 × 10 mm ~ 500 × 500 × 500 mmPOP 3 Plus: 20 × 20 × 20 mm ~ 2000 × 2000 × 2000 mmRANGE 2:50 × 50 × 50 mm ~ 4000 × 4000 × 4000 mmINSPIRE:50×50×50 mm~1000×1000×1000 mmMIRACO:10×10×10 mm~4000×4000×4000 mm
Revopoint POP 3 PlusはPOPシリーズの最新3Dスキャナーです。 POP 3 Plusは プロジェクターの新しい光学ズーム(最大ズーム倍率2倍)により、点群のディテールがPOP 3より30%向上し、構造化光の強度と集光能力が改善されました。 新しいキャリブレーションプレートにより、スキャナーのキャリブレーションの精度と正確度が20%向上。ソフトウェアに全域マーカートラッキングモードが追加されたことで、マーカーポイントキャプチャーの安定性が大幅に向上し、累積点群トラッキングエラーが大幅に減少し、点群の融合がより正確になり、全体的なスキャンサイズの精度が安定化しました。
POP 3 Plusには、ジャイロ、加速度計、磁力計の9軸IMUセンサーが搭載されています。スキャナーを物体の周囲で移動させながらスキャンを行うと、これらのセンサーがPOP 3 Plusの位置情報を検知し、把握することができます。これにより、スキャンデータの滑らかな繋ぎ合わせが可能になり、振動や急激な移動によって生じる不良フレームの低減にも寄与します。
スキャナーをコンピュータに接続し、Revo Scanをオンにします。Revo Scan 5のホーム画面で、スキャナー名の横にある設定アイコンをクリックします。 次に、[キャリブレーションの開始] ボタンをクリックしてプロセスを開始します。 画面の指示に従って POP 3 Plus の再校正を行います。注:IMUキャリブレーションはIMUを搭載したスキャナーのみ適用です。
POP 3 Plusは高解像度の赤外線構造化光、デュアルDepthカメラ、高度なアルゴリズムを使用して、詳細な3Dモデルを出力します。
いいえ、POP 3 Plusは、高度なアルゴリズムと内蔵チップによって処理の大部分を行うため、PCやデバイス側に過度な負荷をかけることなくスムーズなスキャンが可能です。
Windows PCの要件
システム:Windows 10/11(64-bit)
RAM:≥ 16 GB
CPU:i7 12世代以上
接続:USB 3.0以上、Wi-Fi
POP 3 Plusを使用には、NvidiaやAMDの専用GPUは必要ありません。
macOSの要件
システム:macOS 11.0以上
RAM:≥ 8 GB
CPU:M1 Pro以上
接続:Thunderbolt 4以上、Wi-Fi
はい、POP 3 PlusにはRevo Scanという無料ソフトウェアが付属しています。Revo Scanでは、Windows、macOS、iOS、Androidデバイスに対応しており、3Dスキャンとモデルの後処理を行うことができます。
Revo Scan は、Revopoint ウェブサイトのサポート - ダウンロードページ、またはお使いのデバイスのアプリストアから無料でダウンロードできます。
Windows と macOS ユーザーは、Revopoint ウェブサイトの サポート>ダウンロードから Revo Scan をダウンロードしてください。 iOS と Android ユーザーは、Apple App Store または Google Play Store をご利用ください。詳しい使い方が必要な場合は、Revo Scanの学習ページにあるユーザーマニュアルをご参照ください。
いいえ、Revo Scanはモデルのスキャンや編集にインターネットにアクセスできるネットワークへの接続は必要ありません。 ただし、ソフトウェアのアップデートやファイル転送のためにインターネットへのアクセスは必要です。
PCRevo Scanを開き、左上の学習ボタンをクリックすると、ユーザーマニュアルが表示されます。スマホRevo Scanを開き、右上の「設定」アイコンをタップすると、ユーザーマニュアルが表示されます。
PC:Revo Scan を開くと、アップデートが必要な場合、アップデートメッセージが自動的にポップアップ表示されます。 アップデートボタンをクリックして最新版をダウンロードしてください。 また、Revopoint ウェブサイトのサポートダウンロードページからも最新版をダウンロードできます。スマホ:iOS デバイス: Apple App Store を開き、Revo Scan を検索し、更新ボタンをクリックしてください。Android端末:Google Playストアを開き、Revo Scanを検索し、更新ボタンをクリックしてください。
Revo Scan can export your models in PLY, OBJ, STL, ASC, 3MF, GLTF, and FBX for compatibility with most 3D modeling, slicer, and CAD software.
Point Cloud model: PLY, OBJ, ASC
Mesh model: PLY, OBJ, STL, FBX, GLTF, 3MF
Texture model: PLY, OBJ, FBX, GLTF
はい、スキャンしたモデルは、ほとんどのスライサーソフトウェアと互換性のあるSTL、OBJ、3MF形式で出力できます。
はい、Revopoint 3Dスキャナーで作成した3Dモデルは、Autodesk CAD、Blender、Maya、 Rhino、ZBrush、Fusion 360など、ほとんどのデザインソフトウェアと互換性のあるフォーマットでエクスポートすることができます。
いいえ。POP 3 Plusは、スキャンからモデル編集まで対応する専用ソフトウェア「Revo Scan」のみと互換性があります。このソフトウェアは、Revopointの公式サイトまたは各デバイスのアプリストアからダウンロードいただけます。
①スマホとPCが同じWi-Fiネットワークに接続されていることを確認してください。②RevoScan(PC)を開き、ホームページの「新規プロジェクト」ボタンをクリックします。③RevoScan(PC)の「ファイル」メニューの「スマホから転送」をクリックします。④PINコードまたはQRコードによる転送方法をお選びください。⑤RevoScan(モバイル)を開き、転送するプロジェクトを見つけます。⑥RevoScan(モバイル)の「その他」ボタン>「シェア」アイコンをクリックします。⑦認証コードを入力するか、QRコードをスキャンしてください。⑧ファイルの転送が開始されます。注:転送中にアプリを最小化したり、電話のディスプレイをオフにしたりしないでください。
モデルをエクスポートRevo Scanでモデルを開き、タブバーのエクスポートを選択します。必要な形式(PLY、OBJ、STLなど)を選択し、ファイルをコンピュータに保存します。モデルを他社製ソフトウェアにインポートBlenderやMayaなどのサードパーティソフトウェアを開きます。インポート機能を見つけます(通常はファイルメニューの下にあります)。インポートする形式を選択し、Revo Scanからエクスポートしたモデルを選択します。インポートされたモデルは、他社製ソフトウェアで編集することができます。そのソフトウェアが選択したフォーマットに対応していることを確認してください。
ステップ1:ターンテーブルの電源ケーブルでミニターンテーブルをPCまたは電源ソケットに接続します。インジケーターが緑色に点灯したら、電源が入っています。ステップ2:対象物をターンテーブルの中央に置きます。ステップ3:スイッチを左右にフリックしてターンテーブルの回転方向を調整し、ダイヤルをひねって回転速度を調整します。ステップ4:三脚を適切な高さと距離に調整し、スキャナを対象物に向けます。次に、スキャナーの設定を選択し、スキャンを開始します。
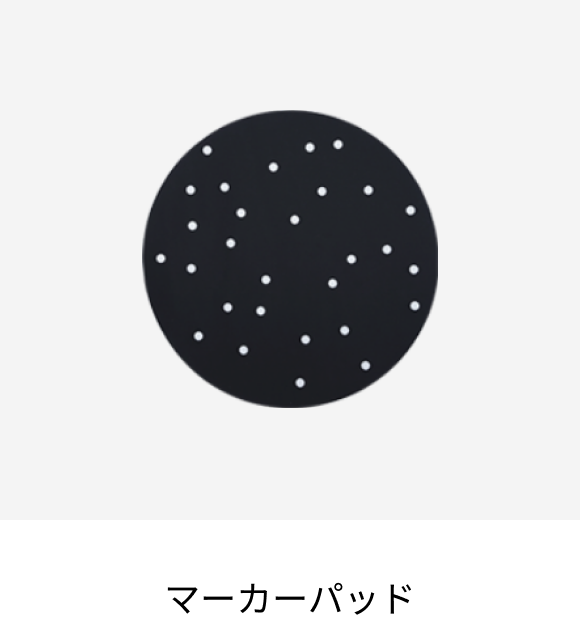
マーカーパッドは、マーカー追跡モードで特徴のない対象物をスキャンする際に便利なアクセサリーです。スキャンを開始するには、マーカーパッドターンテーブルの上に置き、その上に対象物を置き、Revo Scanでマーカートラッキングを選択します。
電源出力: 12V/2A寸法:(D)200ミリメートルX(H)82ミリメートル重量 約771gターンテーブル回転数:18~90秒/回転最大荷重: 5 kg操作方法:ボタン/アプリ経由(レボスキャン/レボアシスタント)コントロール :方向、チルト、スピード、開始/一時停止
1. 二軸ターンテーブル2. 電源ケーブル3. アダプター4. 再利用可能な粘着パッド5. マーカーパッド
キャリブレーションボードを使用して Revopoint 3D スキャナをキャリブレーションすることは、スキャンの精度を確保するために重要です。以下はキャリブレーションボードの基本的な使用方法です:準備最新版の Revo Scan ソフトウェアをコンピュータにダウンロード・インストールし、開きます。同梱のケーブルを使用してスキャナをコンピュータのUSB 3.0ポートに接続し、スキャナが接続されるのを待ちます。スキャナのレンズがきれいで、ほこりや汚れがないことを確認してください。キャリブレーションボードの設置キャリブレーションボードを平らで安定した場所に置き、ボード上のパターンがはっきりと見えるようにします。キャリブレーションプログラムに入るキャリブレーションプログラムに入るには、ホームページの左下にある「スキャナキャリブ レーション」オプションをクリックします。キャリブレーションを開始し、表示される手順に従います。画面の指示に従ってキャリブレーションを完了します。
マーカーポイントは、POP 3 Plusが正しくトラッキングできるように、特徴のないオブジェクトの表面またはその周りに貼り付くものです。 スキャン画面に常に5つのマーカーが映られることを確認してください。 近景モードの場合は、マーカーを約3~5 cmの間隔でランダムに配置し、遠景モードの場合は5 cmの間隔で配置してください。
マジックマットは、表面全体に高反射性のマーカーポイントが付いた黒いマットです。マーカーポイントをアイテムに配置する必要をなくすことで、特徴のないオブジェクトのスキャンを簡素化するように設計されています。
いいえ、複数回スキャンすると、誤差が積み重ねていくので、1つの角度につき一周のみスキャンするようにしてください。
POP 3 Plusは、他の多くの3Dスキャナーと同様に、光沢の強い物、透明な物、または色の濃い物体を効果的にスキャンするために、3Dスキャン用スプレーが必要となります。
これらの物体は特殊な表面形状のため、スキャンが困難です。スキャンする前に、スキャンスプレーやベビーパウダーのような細かいパウダーで表面をコーティングすることができます。
はい、POP 3 Plusは屋外でも使用できますが、直射日光の下でのスキャンは避けてください。屋外で使用する場合は、日没後や日の出前、または厚い雲に覆われた曇天時をおすすめします。
POP 3 Plusの推奨スキャンサイズは20×20×20mm~2000×2000×2000mmです。
照明: 対象物を均一でソフトな照明でスキャンし、陰影や反射を避ける。RGB露出の調整:カラースキャンを切り替え、プレビューウィンドウの対象物の色が鮮明になるまでRGBカメラの露出を調整します。ホワイトバランスを調整します: RGBカメラのプレビューウィンドウで、ホワイトバランススイッチを切り替え、色が正しく見えるまで調整します。
トラッキングロスが発生する原因はいくつかあります:スキャナーの移動速度が速すぎたり、スキャン中に対象物に対する相対位置が変化しすぎたりすると、トラッキングロスが発生することがあります。このような場合は、スキャナーを以前にスキャンした場所に移動し、スキャナがトラッキングを回復するまで数秒待ちます。その後、スキャナーを固定し、一定の速度でスキャンを続行します。ボールやカップのような特徴のない物体をスキャンすると、トラッキングが失われることがあります。このような場合は、対象物にマーカーを付けてからスキャンしてください。対象物の表面にコントラストの強い色の違いがある場合、トラッキングが失われることがあります。このような場合は、スキャンを一時停止し、表面 がはっきりと検出できるまで深度カメラの露出を調整してください。
マーカーを使う: 対象物の上や周囲にマーカーを貼り付けるか、マジックマットやターンテーブルトッパーを対象物の下に敷いてください。スキャン中、1つのフレームで少なくとも5つのマーカーが検出できることを確認し、マーカー追跡モードを選択してスキャンします。参照オブジェクトを使用する: スキャンする対象物の周囲に明確な特徴を持つ参照オブジェクトを1~3個置き、特徴追跡モードを選択します。
POP 3 Plusの推奨最小スキャンサイズは20 x 20 x 20 mmです。これより小さいオブジェクトをスキャンする場合は、高度なスキャン技術や後処理のスキルが必要となります。
はい、POP 3 Plusは3D顔面スキャナーとして使用でき、詳細な顔面の幾何学的形状およびフルカラーの3D顔面モデルを取得することが可能です。その赤外線構造光技術は目に安全で、人間の顔のスキャンに適しています。また、ハンドヘルド設計により、3Dアバター、デジタルアート、アニメーション、個人プロジェクトなどの用途に向けて、迅速かつ快適な顔面スキャンが可能です。
A:POP 3 Plusは、単一フレーム精度で最大0.08 mmを実現し、輪郭や表情などの繊細な顔面の詳細を捉えるのに適しています。HD RGBカメラと9軸IMUを組み合わせることで、スキャナーは安定したトラッキングと滑らかなデータ融合を提供し、自然なカラーテクスチャを備えた正確でリアルな3D顔面スキャンを実現します。